publications
2025
-
 Can’t Touch This: Real-Time, Safe Motion Planning and Control for Manipulators Under UncertaintyIEEE Transactions on Robotics. More Information can be found here , 2025
Can’t Touch This: Real-Time, Safe Motion Planning and Control for Manipulators Under UncertaintyIEEE Transactions on Robotics. More Information can be found here , 2025 - Phasing Through the Flames: Rapid Motion Planning with the AGHF PDE for Arbitrary Objective Functions and ConstraintsarXiv preprint arXiv:2505.01589. More Information can be found here , 2025
-
 Provably-Safe, Online System IdentificationRobotics: Science and Systems. More Information can be found here , 2025
Provably-Safe, Online System IdentificationRobotics: Science and Systems. More Information can be found here , 2025 -
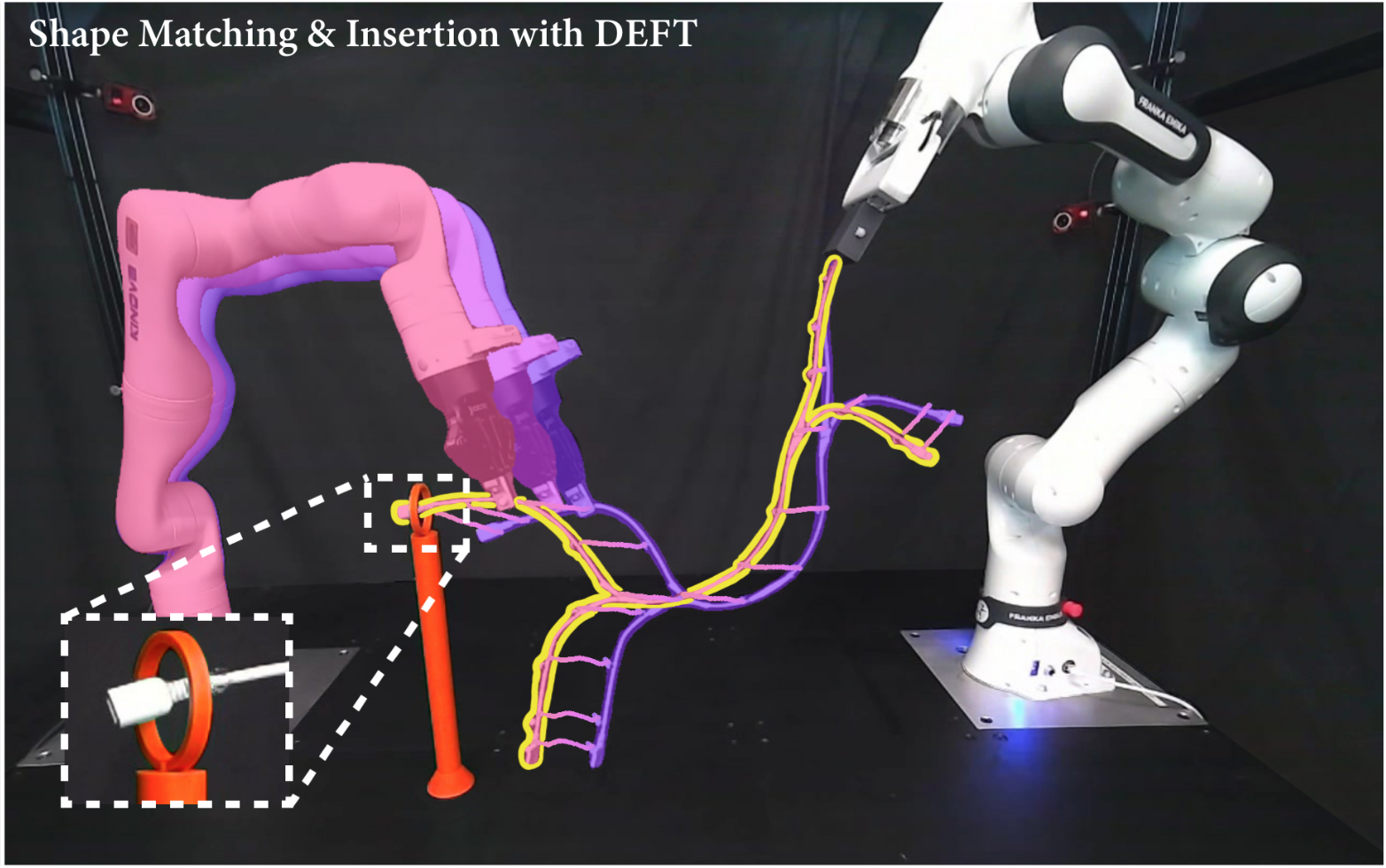 DEFT: Differentiable Branched Discrete Elastic Rods for Modeling Furcated DLOs in Real-Time. More Information can be found here , 2025
DEFT: Differentiable Branched Discrete Elastic Rods for Modeling Furcated DLOs in Real-Time. More Information can be found here , 2025 - Bring the Heat: Rapid Trajectory Optimization with Pseudospectral Techniques and the Affine Geometric Heat Flow EquationIEEE Robotics and Automation Letters. More Information can be found here , 2025
-
 Conformalized Reachable Sets for Obstacle Avoidance With SpheresICRA. More Information can be found here , 2025
Conformalized Reachable Sets for Obstacle Avoidance With SpheresICRA. More Information can be found here , 2025
2024
-
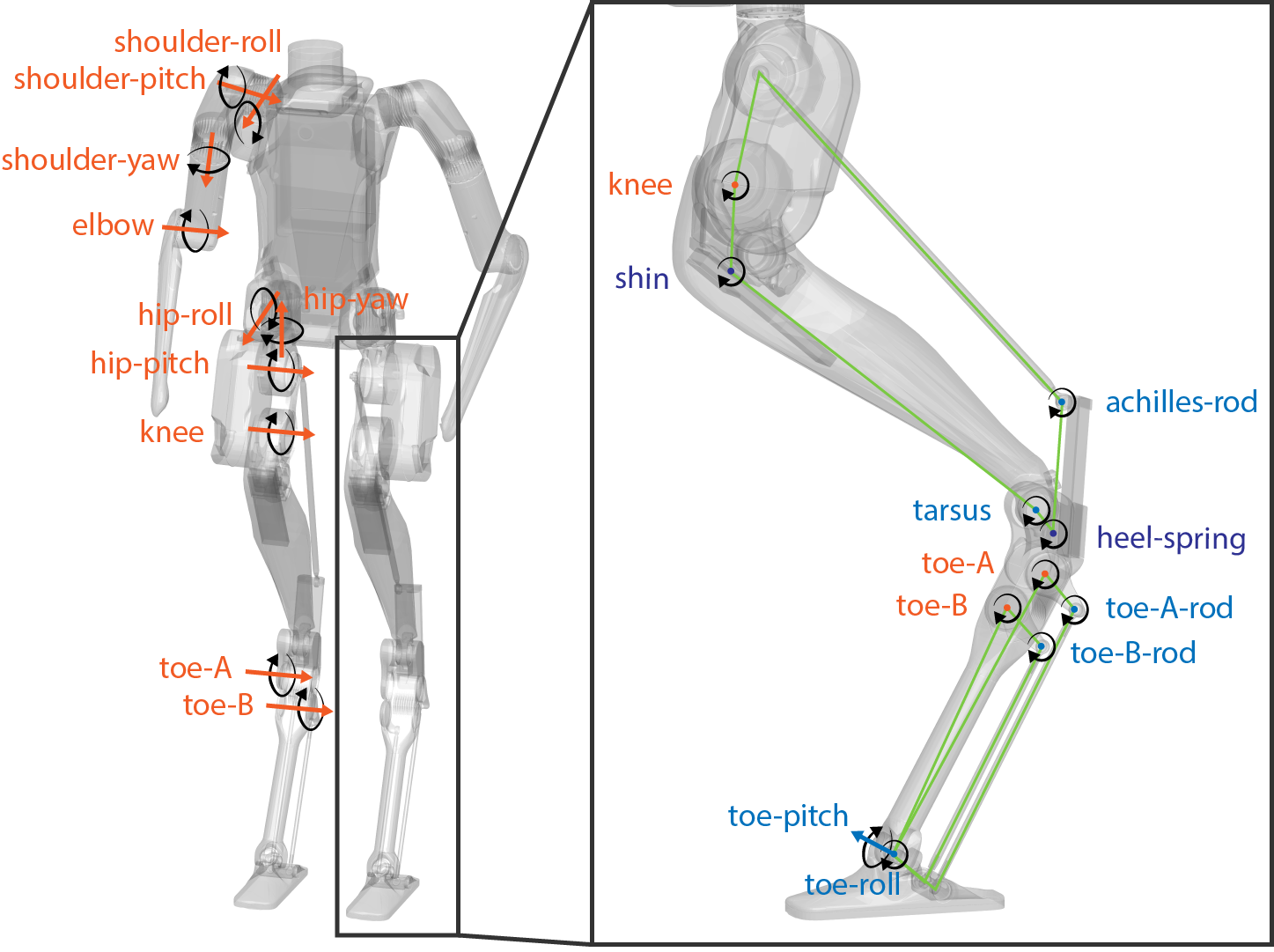
 Rapid and Robust Trajectory Optimization for HumanoidsarXiv preprint arXiv:2409.00303. More Information can be found here , 2024
Rapid and Robust Trajectory Optimization for HumanoidsarXiv preprint arXiv:2409.00303. More Information can be found here , 2024 -
 System Identification For Constrained RobotsarXiv preprint arXiv:2408.08830. More Information can be found here , 2024
System Identification For Constrained RobotsarXiv preprint arXiv:2408.08830. More Information can be found here , 2024 - Jointed Tails Enhance Control of Three-dimensional Body RotationRoyal Society Interface, 2024
-
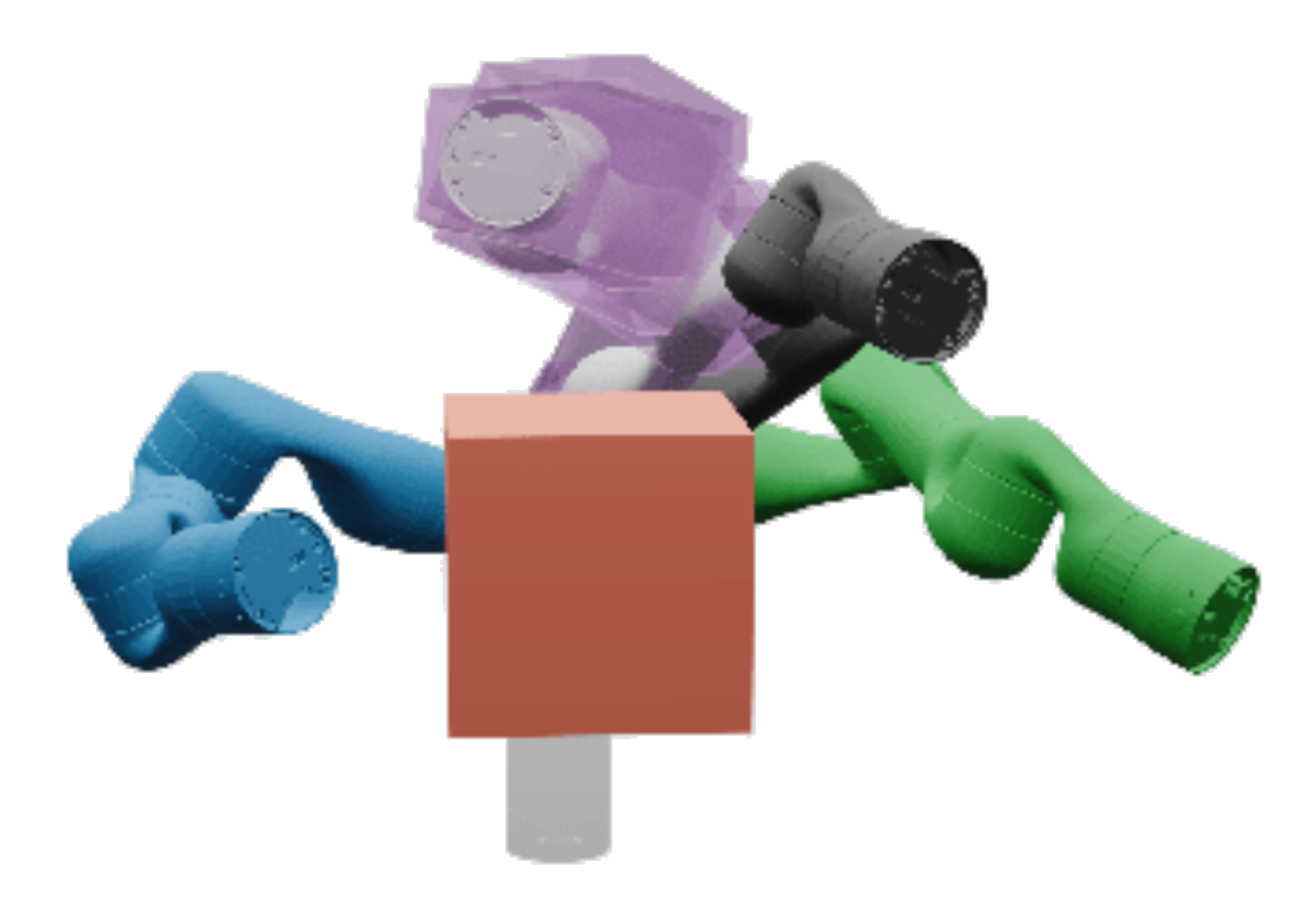
 Safe Planning for Articulated Robots Using Reachability-based Obstacle Avoidance With SpheresRobotics: Science and Systems. More Information can be found here , 2024
Safe Planning for Articulated Robots Using Reachability-based Obstacle Avoidance With SpheresRobotics: Science and Systems. More Information can be found here , 2024 -
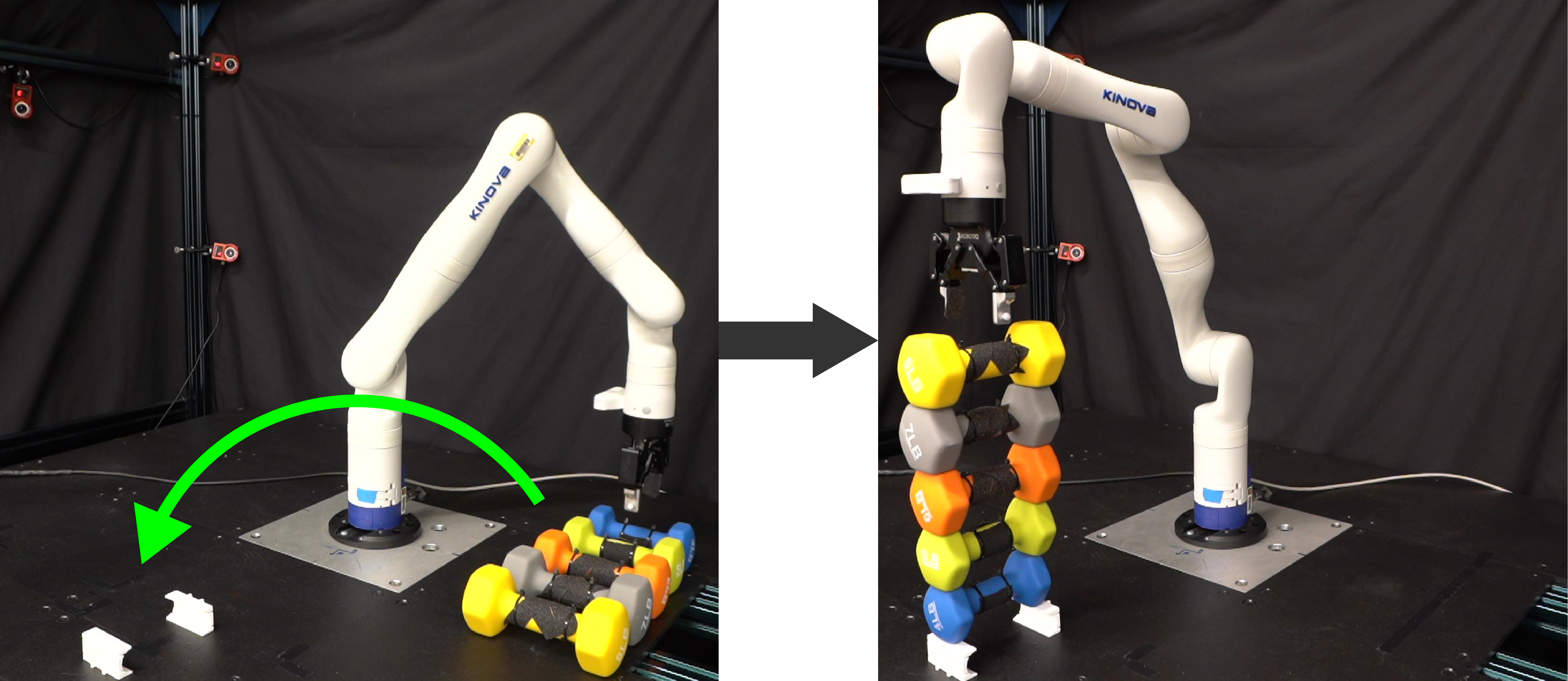
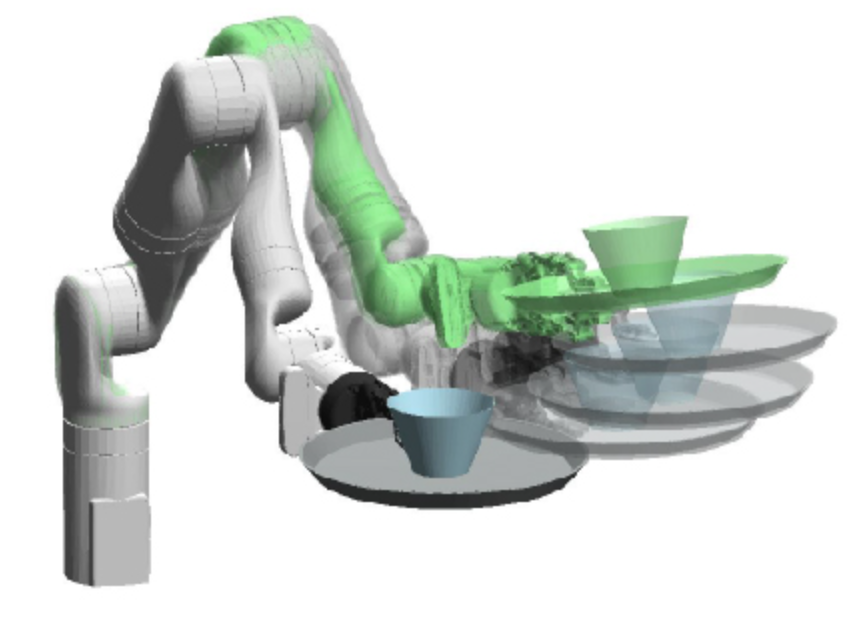 Serving time: Real-time, safe motion planning and control for manipulation of unsecured objectsIEEE Robotics and Automation Letters. More Information can be found here , 2024
Serving time: Real-time, safe motion planning and control for manipulation of unsecured objectsIEEE Robotics and Automation Letters. More Information can be found here , 2024
2020
-
 Safe, optimal, real-time trajectory planning with a parallel constrained bernstein algorithmIEEE Transactions on Robotics, 2020
Safe, optimal, real-time trajectory planning with a parallel constrained bernstein algorithmIEEE Transactions on Robotics, 2020 - Reachable sets for safe, real-time manipulator trajectory designRobotics: Science and Systems, 2020