Precise manipulation tasks require accurate knowledge of payload inertial parameters. Unfortunately, identifying these parameters for unknown payloads while ensuring that the robotic system satisfies its input and state constraints while avoiding collisions with the environment remains a significant challenge. This paper presents an integrated framework that enables robotic manipulators to safely and automatically identify payload parameters while maintaining operational safety guarantees. The framework consists of two synergistic components: an online trajectory planning and control framework that generates provably-safe exciting trajectories for system identification that can be tracked while respecting robot constraints and avoiding obstacles and a robust system identification method that computes rigorous overapproximative bounds on end-effector inertial parameters assuming bounded sensor noise. Experimental validation on a robotic manipulator performing challenging tasks with various unknown payloads demonstrates the framework’s effectiveness in establishing accurate parameter bounds while maintaining safety throughout the identification process.
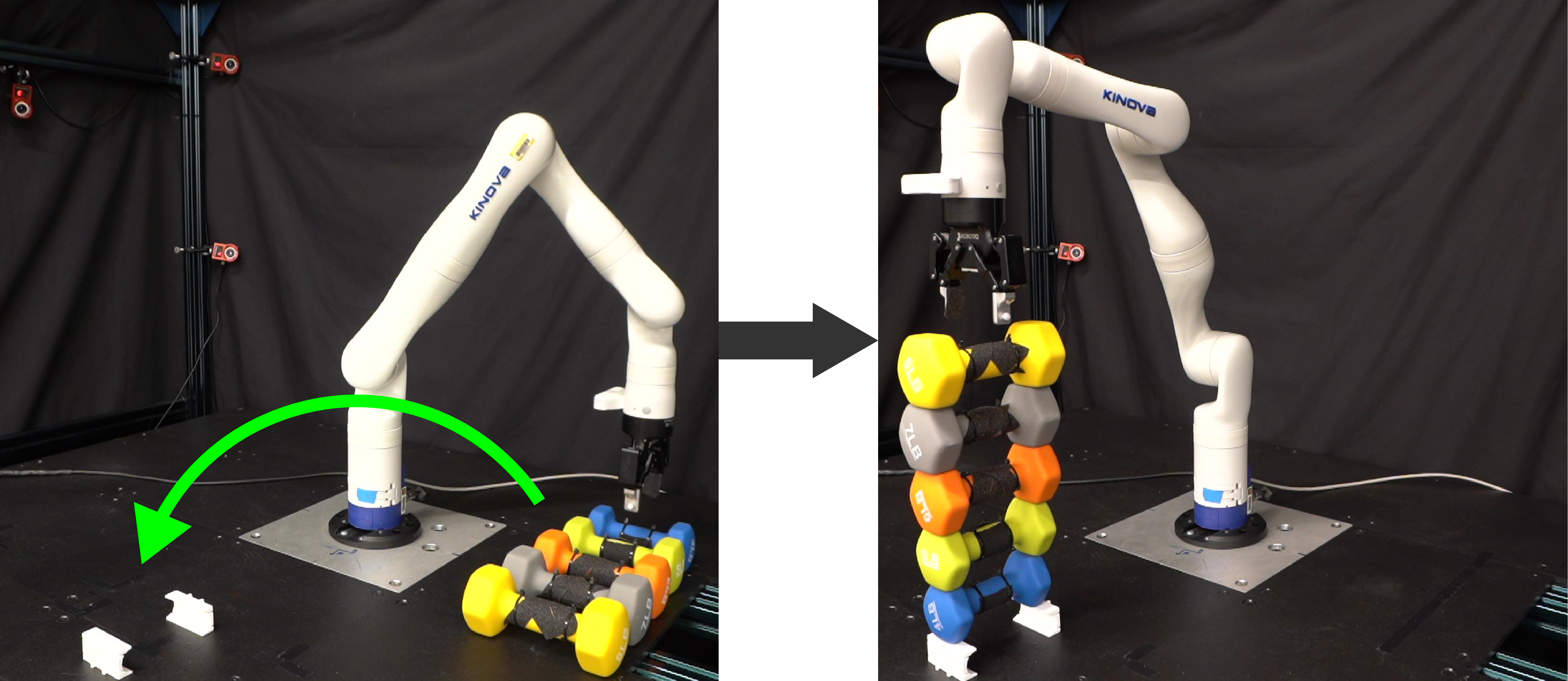
The above figure illustrates how the method proposed in this paper enables the completion complex manipulation task on a 7 degree-of-freedom Kinova-gen3 robotic arm. (a) Initially, the robot picks up a series of heavy dumbbells that are close to the design limit of the robot. The inertial parameters of this payload are unknown. (b) The robot then performs online system identification to estimate an interval bound using the method developed in this paper. The interval estimate of the inertial parameters generated by the algorithm is guaranteed to include the true inertial parameters of the dumbbell. Notably, the data used to compute this interval estimate is constructed in a manner that is guaranteed to be collision free while satisfying joint and torque limits. The inertial parameter bound is then used to update the planner and the controller, which allows the robot to (c) safely move all dumbbells to the other side around the obstacles and then (d) stack them vertically in order of increasing weight, which requires high precision. Our experiments illustrate that state-of-the-art methods that do not incorporate such provably overapproximative estimates of the inertial parameters result in a failure to complete the task safely, due to exceeding the torque limits, colliding with obstacles, or misplacing the dumbbells.
This video illustrates a complex pick-and-place task, which can be successfully handled only by our method. Five dumbbells are placed on one side of the robot, whose inertial parameters are unknown to it (first image in both rows). The robot is required to move each dumbbell around the obstacles, place the lightest dumbbell on a 3D-printed platform in front of it, and stack the remaining dumbbells vertically in ascending order of weight (fourth image in both rows).
More information can be found at https://roahmlab.github.io/OnlineSafeSysID/.
For citation, please refer to
(Zhang et al., 2025)
References
2025
-
Provably-Safe, Online System Identification
Bohao Zhang, Zichang Zhou, and Ram Vasudevan
Robotics: Science and Systems.
More Information can be
found here , 2025

 Provably-Safe, Online System IdentificationRobotics: Science and Systems. More Information can be found here , 2025
Provably-Safe, Online System IdentificationRobotics: Science and Systems. More Information can be found here , 2025