Serving Time; Real-Time, Safe Motion Planning and Control for Manipulation of Unsecured Objects
A key challenge to ensuring the rapid transition of robotic systems from the industrial sector to more ubiquitous applications is the development of algorithms that can guarantee safe operation while in close proximity to humans. Motion planning and control methods, for instance, must be able to certify safety while operating in real-time in arbitrary environments and in the presence of model uncertainty. This paper proposes Wrench Analysis for Inertial Transport using Reachability (WAITR), a certifiably safe motion planning and control framework for serial link manipulators that manipulate unsecured objects in arbitrary environments. WAITR uses reachability analysis to construct over-approximations of the contact wrench applied to unsecured objects, which captures uncertainty in the manipulator dynamics, the object dynamics, and contact parameters such as the coefficient of friction. An optimization problem formulation is presented that can be solved in real-time to generate provably-safe motions for manipulating the unsecured objects. This paper illustrates that WAITR outperforms state of the art methods in a variety of simulation experiments and demonstrates its performance in the real-world.

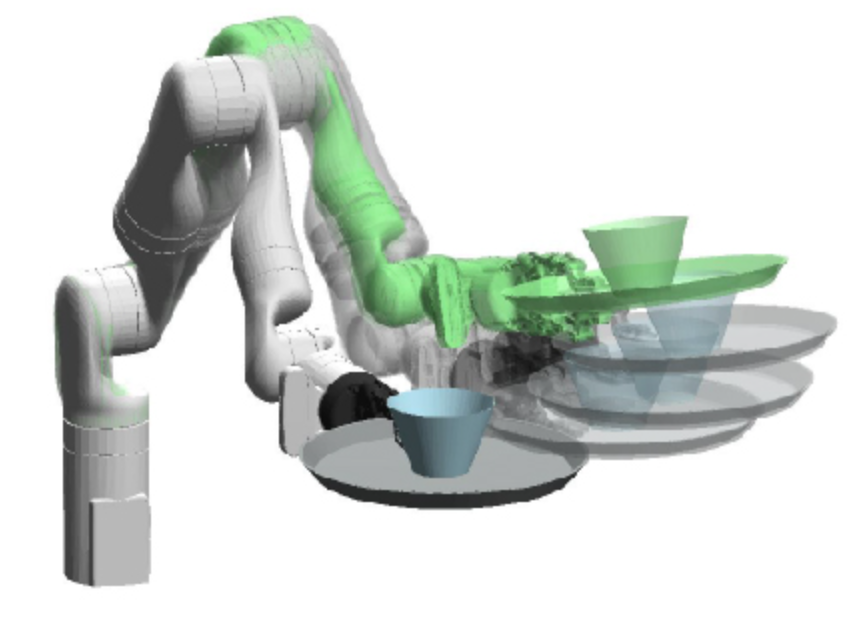
WAITR considers the problem of safe motion planning for manipulation of unsecured objects with uncertain dynamics such as manipulating an unsecured cup filled with an uncertain mass around randomly placed obstacles (red) such that the cup does not move relative to the tray supporting it. WAITR operates in receding-horizon fashion, moving from a start configuration (blue) to a global goal (green) by repeatedly generating new motion plans in real-time. In each motion planning iteration, WAITR calculates a reachable set (blue and purple) for the contact wrench between the manipulator and the object as well as a Forward Reachable Set (FRS) for the whole manipulator system for a continuum of possible motion plans. The FRS is shown in purple in a) for a single planning iteration. WAITR solves a constrained trajectory optimization problem to find a collision-free motion in this FRS that does not result in relative motion while making progress towards an intermediate waypoint (grey) and the global goal. Parts c)-e) show the contact constraints enforced during a hardware experiment for a single planning iteration.
More information can be found at https://roahmlab.github.io/waitr-dev/.
For citation, please refer to
(Brei et al., 2024)
References
2024
-
 Serving time: Real-time, safe motion planning and control for manipulation of unsecured objectsIEEE Robotics and Automation Letters. More Information can be found here , 2024
Serving time: Real-time, safe motion planning and control for manipulation of unsecured objectsIEEE Robotics and Automation Letters. More Information can be found here , 2024