System Identification For Constrained Robots
Identifying the parameters of robotic systems, such as motor inertia or joint friction, is critical to satisfactory controller synthesis, model analysis, and observer design. Conventional identification techniques are designed primarily for unconstrained systems, such as robotic manipulators. In contrast, the growing importance of legged robots that feature closed kinematic chains or other constraints, poses challenges to these traditional methods. This paper introduces a system identification approach for constrained systems that relies on iterative least squares to identify motor inertia and joint friction parameters from data.

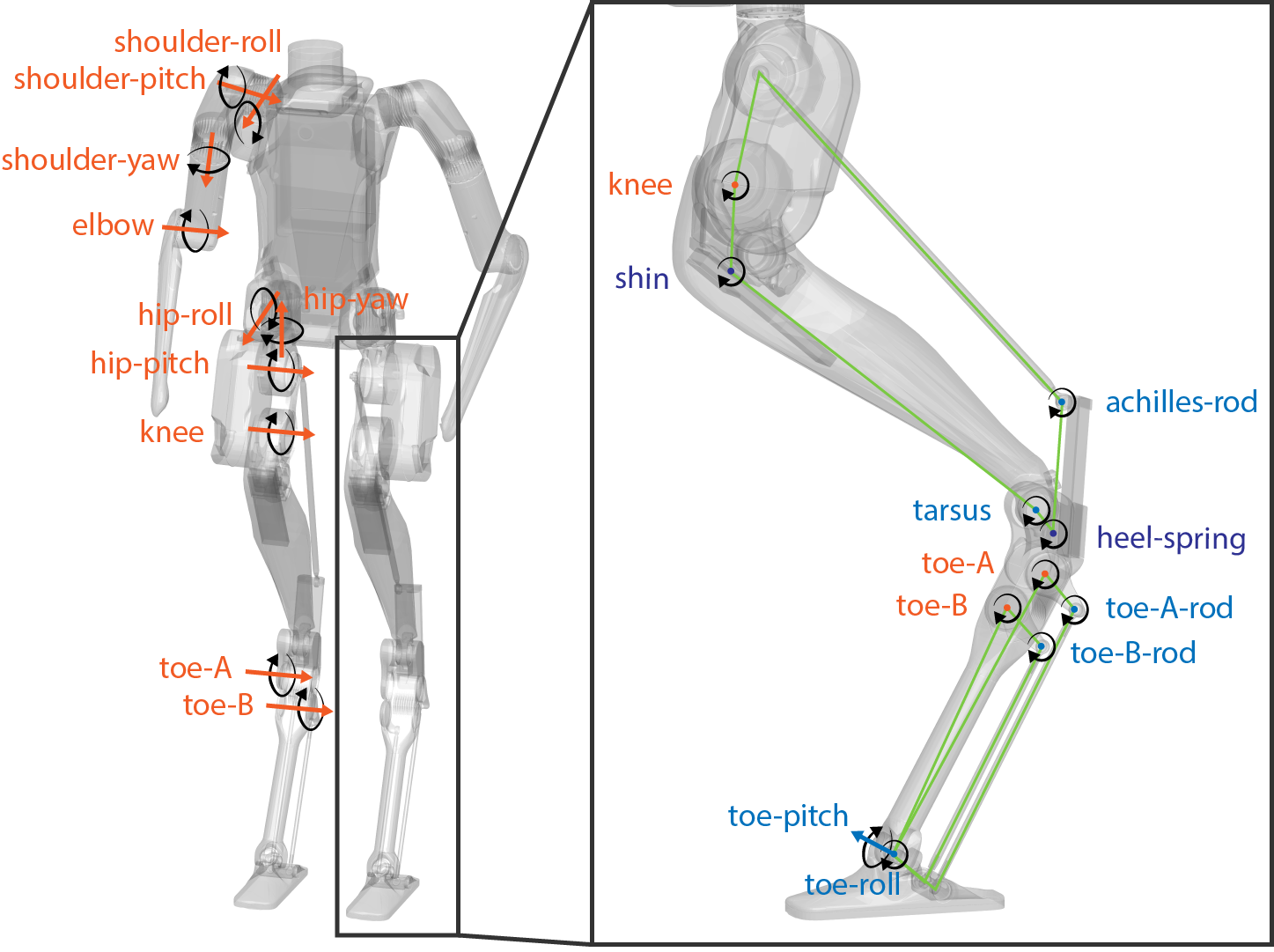
This paper proposes a system identification method for systems with constraints such as the humanoid, Digit (image on left). Note that Digit has a closed loop kinematic constraint in each of its legs. By using the algorithm developed in this paper, one can identify the inertial and friction parameters of the system from data. To illustrate the utility of this method, this paper compared the performance of a model based tracking controller to track a user-specified trajectory. The tracking performance of the controller was significantly less when using the parameters identified by the algorithm developed in this paper (drawn in red on the right) when compared to using the parameters specified by the manufacturer (drawn in blue on the right). The actual behavior of the robot while following the user-specified trajectory using the parameters identified by the algorithm developed in this paper can be seen on the top right of the image at 4 time instances.
The implementation of the approach is available at https://github.com/roahmlab/ConstrainedSysID.
For citation, please refer to
(Zhang et al., 2024)
References
2024
-
 System Identification For Constrained RobotsarXiv preprint arXiv:2408.08830. More Information can be found here , 2024
System Identification For Constrained RobotsarXiv preprint arXiv:2408.08830. More Information can be found here , 2024