Bohao Zhang
Senior Robotics Software Engineer - Tesla - Optimus

jimzhang at umich dot edu
Palo Alto, CA
I am now a Senior Robotics Software Engineer at Tesla, working on hand control for Optimus humanoid robot.
I completed my Ph.D. in Robotics at the University of Michigan in April 2025. Prior to my doctoral studies, I earned a B.S.E. in Computer Engineering from the University of Michigan, Ann Arbor, and a dual B.S.E. in Electrical and Computer Engineering from Shanghai Jiaotong University, both in 2020.
My research interests focus on robust control, system identification, and trajectory optimization, particularly applied to humanoid robots and robotic manipulators.
My biggest goal is to make Optimus play badminton with me.
selected publications
-
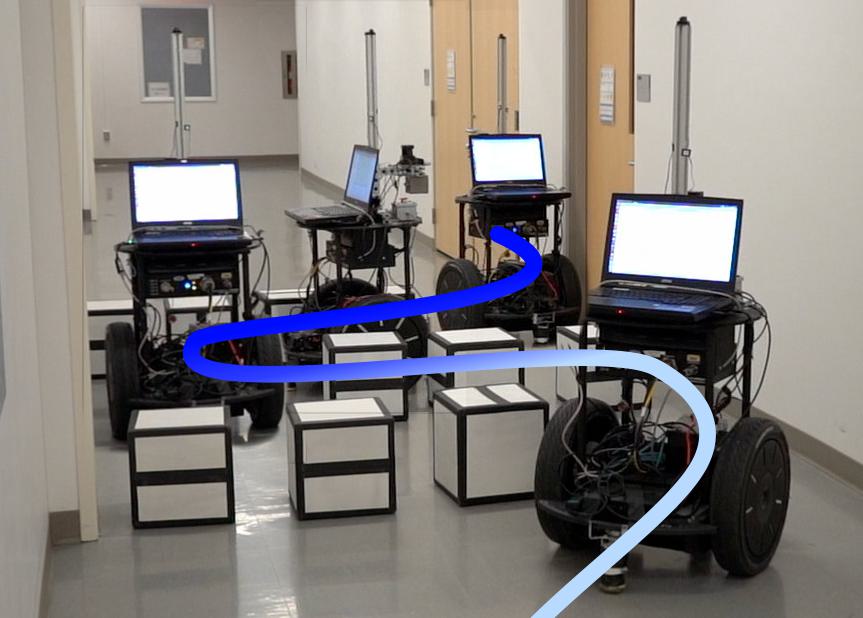
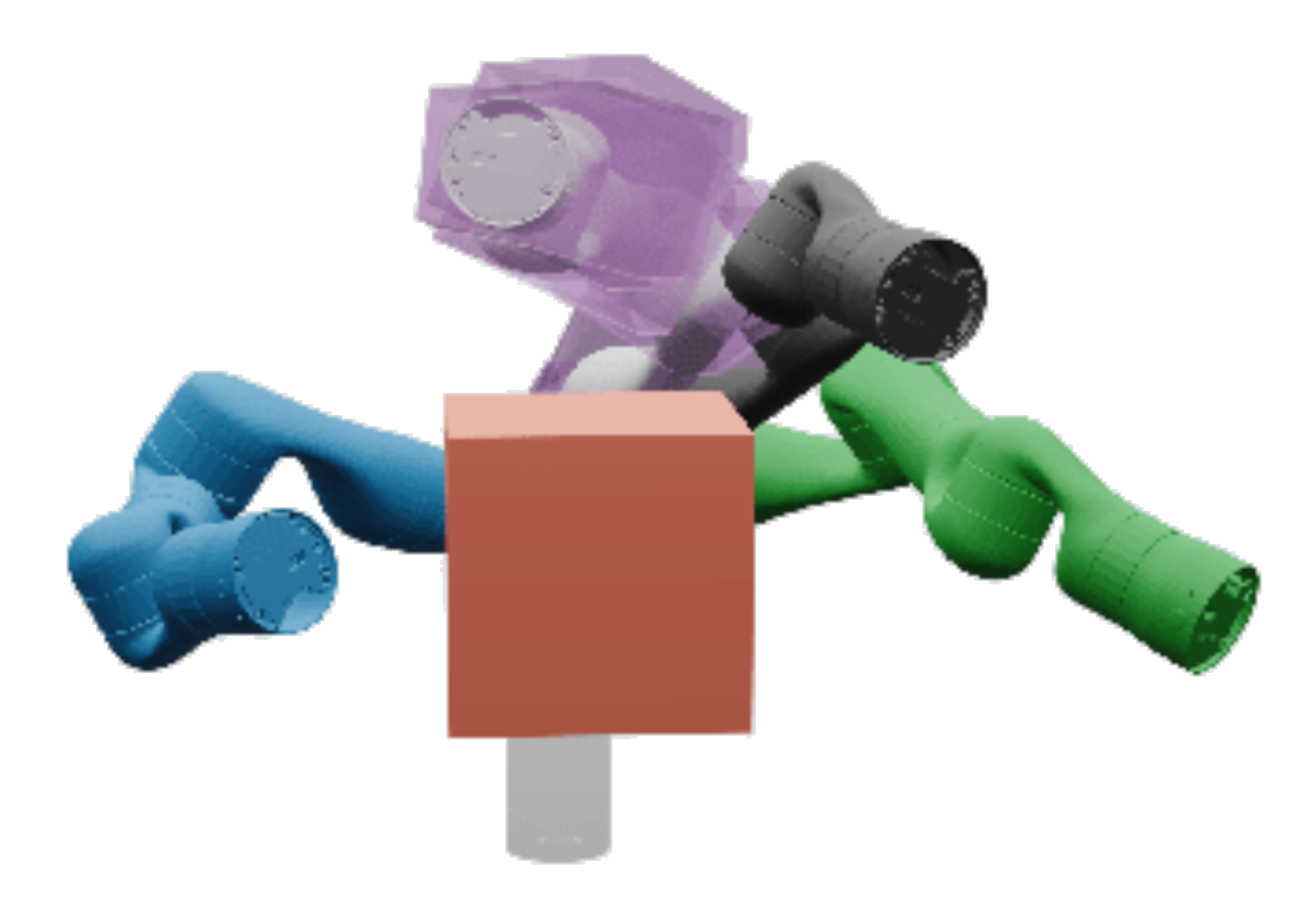 Can’t Touch This: Real-Time, Safe Motion Planning and Control for Manipulators Under UncertaintyIEEE Transactions on Robotics. More Information can be found here , 2025
Can’t Touch This: Real-Time, Safe Motion Planning and Control for Manipulators Under UncertaintyIEEE Transactions on Robotics. More Information can be found here , 2025 -
 Provably-Safe, Online System IdentificationRobotics: Science and Systems. More Information can be found here , 2025
Provably-Safe, Online System IdentificationRobotics: Science and Systems. More Information can be found here , 2025 -
 Conformalized Reachable Sets for Obstacle Avoidance With SpheresICRA. More Information can be found here , 2025
Conformalized Reachable Sets for Obstacle Avoidance With SpheresICRA. More Information can be found here , 2025 -
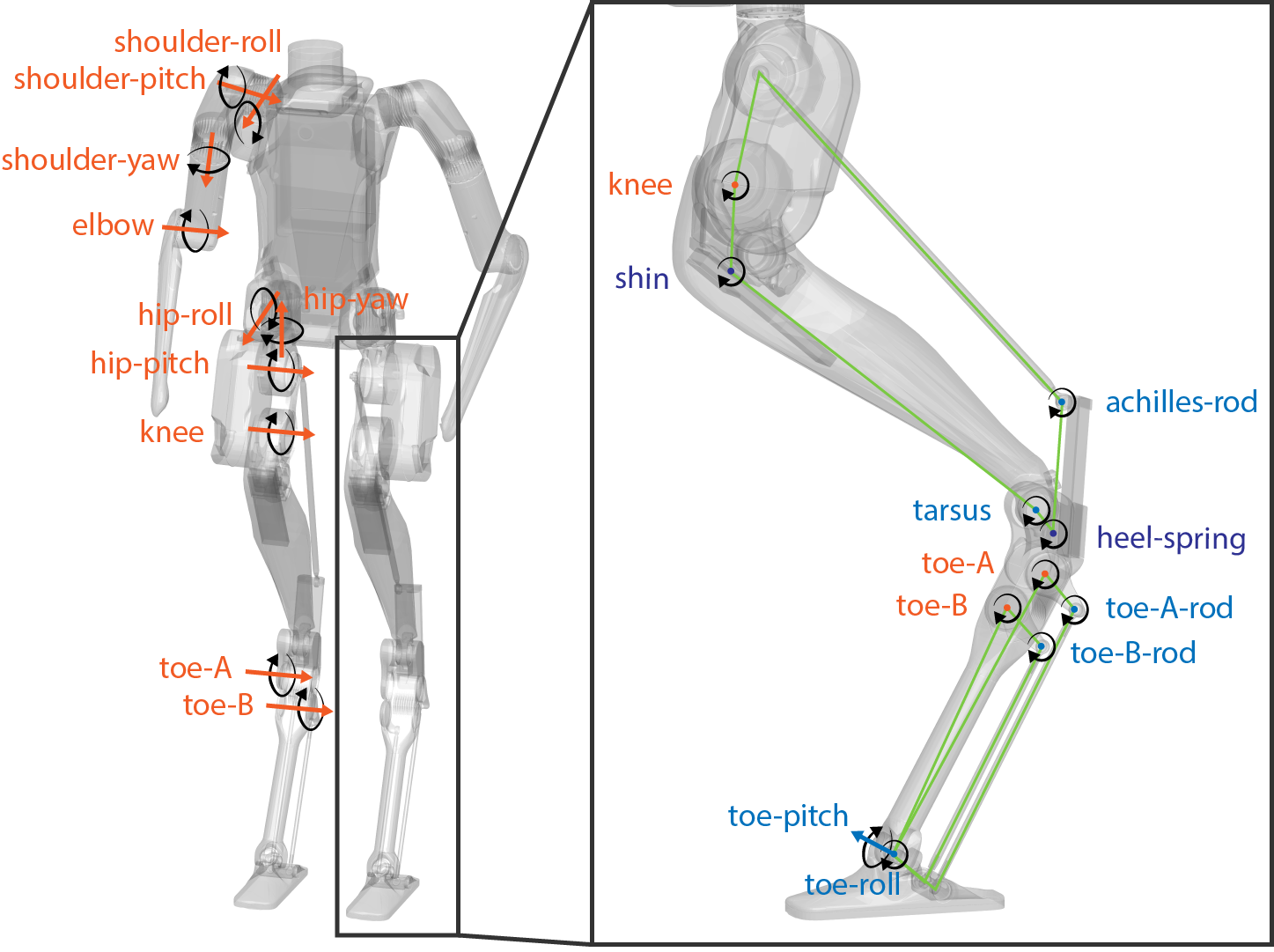
 Rapid and Robust Trajectory Optimization for HumanoidsarXiv preprint arXiv:2409.00303. More Information can be found here , 2024
Rapid and Robust Trajectory Optimization for HumanoidsarXiv preprint arXiv:2409.00303. More Information can be found here , 2024 -
 System Identification For Constrained RobotsarXiv preprint arXiv:2408.08830. More Information can be found here , 2024
System Identification For Constrained RobotsarXiv preprint arXiv:2408.08830. More Information can be found here , 2024 -
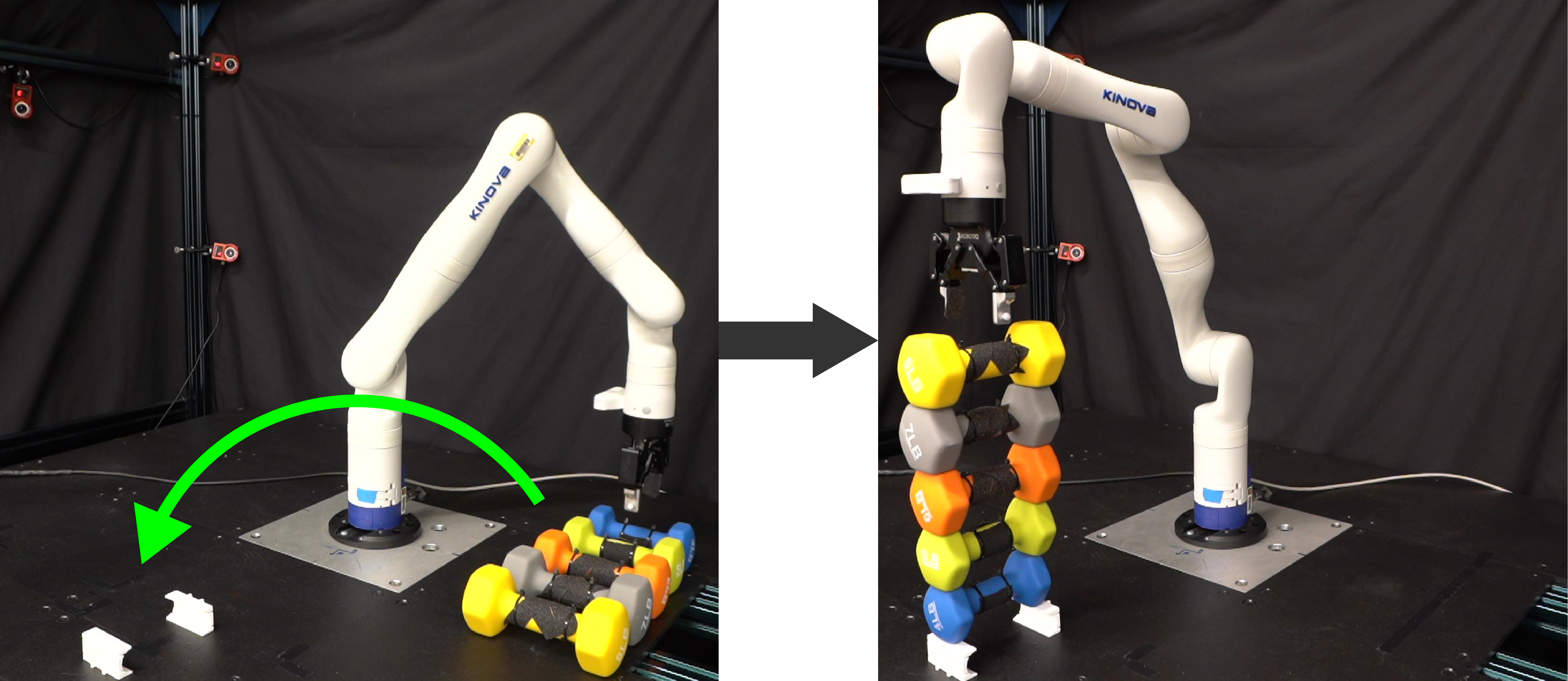
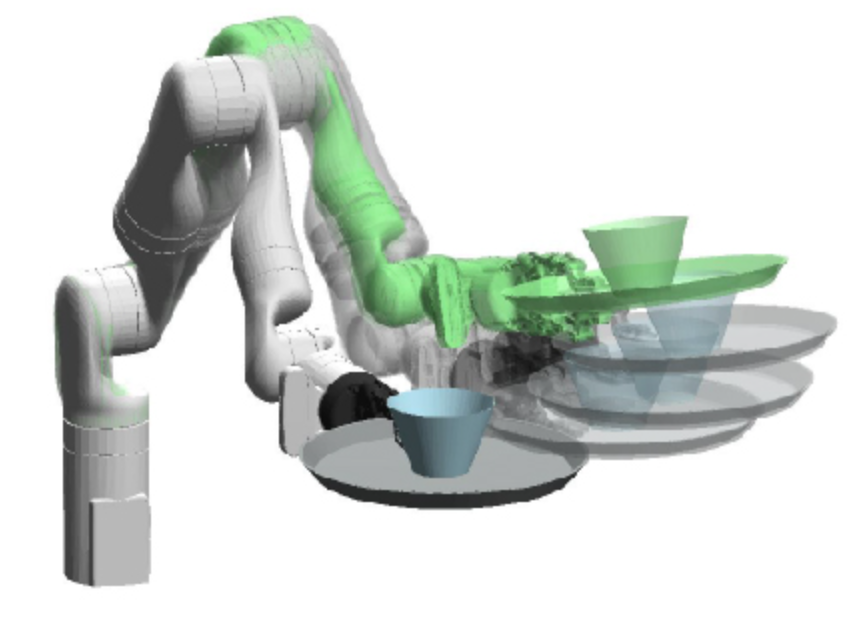 Serving time: Real-time, safe motion planning and control for manipulation of unsecured objectsIEEE Robotics and Automation Letters. More Information can be found here , 2024
Serving time: Real-time, safe motion planning and control for manipulation of unsecured objectsIEEE Robotics and Automation Letters. More Information can be found here , 2024 -
 Safe, optimal, real-time trajectory planning with a parallel constrained bernstein algorithmIEEE Transactions on Robotics, 2020
Safe, optimal, real-time trajectory planning with a parallel constrained bernstein algorithmIEEE Transactions on Robotics, 2020